Description
Description
The flow 2015 benchmark consists of 200 training scenes and 200 test scenes (4 color images per scene, saved in loss less png format). Compared to the stereo 2012 and flow 2012 benchmarks, it comprises dynamic scenes for which the ground truth has been established in a semi-automatic process. Our evaluation server computes the percentage of bad pixels averaged over all ground truth pixels of all 200 test images. For this benchmark, we consider a pixel to be correctly estimated if the disparity or flow end-point error is <3px or <5% (for scene flow this criterion needs to be fulfilled for both disparity maps and the flow map). We require that all methods use the same parameter set for all test pairs. Our development kit provides details about the data format as well as MATLAB / C++ utility functions for reading and writing disparity maps and flow fields. More details can be found in Object Scene Flow for Autonomous Vehicles (CVPR 2015).
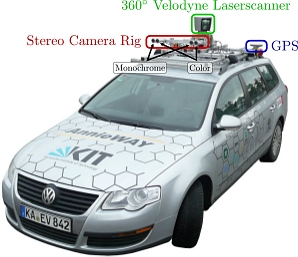
Data Collection
We equipped a standard station wagon with two high-resolution color and grayscale video cameras. Accurate ground truth is provided by a Velodyne laser scanner and a GPS localization system. Our datsets are captured by driving around the mid-size city of Karlsruhe, in rural areas and on highways. Up to 15 cars and 30 pedestrians are visible per image.